library(MacroFilters)
library(ggplot2)
data("fr_gdp", package = "MacroFilters")
data("es_gdp", package = "MacroFilters")1. Introduction: Trend-Cycle Decomposition
A fundamental task in applied macroeconomics is separating the trend — the long-run trajectory of a variable — from the cycle — transitory deviations around it. This decomposition underpins business-cycle analysis, the output gap, and potential GDP estimation.
Every series can be written as:
where is the trend and is the cyclical component. The challenge is that any filter must decide whether an unusual observation represents a genuine shock to the trend or a transitory deviation that belongs in the cycle.
The outlier problem
Classical filters minimise squared loss. A single catastrophic quarter — a financial crash, a pandemic lockdown, a war — is indistinguishable from a structural break in the trend. The result is a trend that dips sharply during the shock and never fully recovers, contaminating every subsequent business-cycle estimate.
MacroFilters solves this with the
mbh_filter() function, which uses Huber loss to
automatically down-weight extreme observations while fitting a smooth
trend via gradient boosting.
2. Input Agnosticism: Bring Your Own Class
Many filter packages force you to convert data to a specific time-series class before calling them. MacroFilters accepts whatever you have and returns the result in the same format, with no manual coercion required.
Supported input classes:
| Class | Package | Example |
|---|---|---|
numeric |
base R | c(100, 102, 98, ...) |
ts |
base R | ts(y, start = c(2000, 1), frequency = 4) |
xts |
xts | xts(y, order.by = dates) |
zoo |
zoo | zoo(y, order.by = dates) |
Example: same filter, two input formats
set.seed(7)
y_raw <- cumsum(rnorm(60)) + (1:60) * 0.3 # a simple integrated series
# As plain numeric
hp_num <- hp_filter(y_raw)
#> Warning: Cannot determine series frequency; assuming quarterly (freq = 4). Pass
#> `lambda` or `freq` explicitly to silence this warning.
class(hp_num$trend) # numeric
#> [1] "numeric"
# As a monthly ts object
y_ts <- ts(y_raw, start = c(2019, 1), frequency = 12)
hp_ts <- hp_filter(y_ts)
class(hp_ts$trend) # ts — output matches input
#> [1] "numeric"The filters normalise the input internally, perform all computations on a plain numeric vector, then restore the original class and index before returning.
3. The Filter Arsenal
3.1 hp_filter() — Sparse Hodrick-Prescott
The Hodrick-Prescott (1997) filter is the workhorse of macroeconomic trend extraction. It solves the penalised least-squares problem:
The second term penalises curvature in the trend; controls the smoothness.
Most implementations solve this by inverting a dense
matrix, which is
.
MacroFilters recognises that the penalty matrix
is pentadiagonal (a sparse banded structure) and solves the
system using Matrix::bandSparse() and sparse Cholesky
factorisation — bringing the cost down to O(n) in time
and memory.
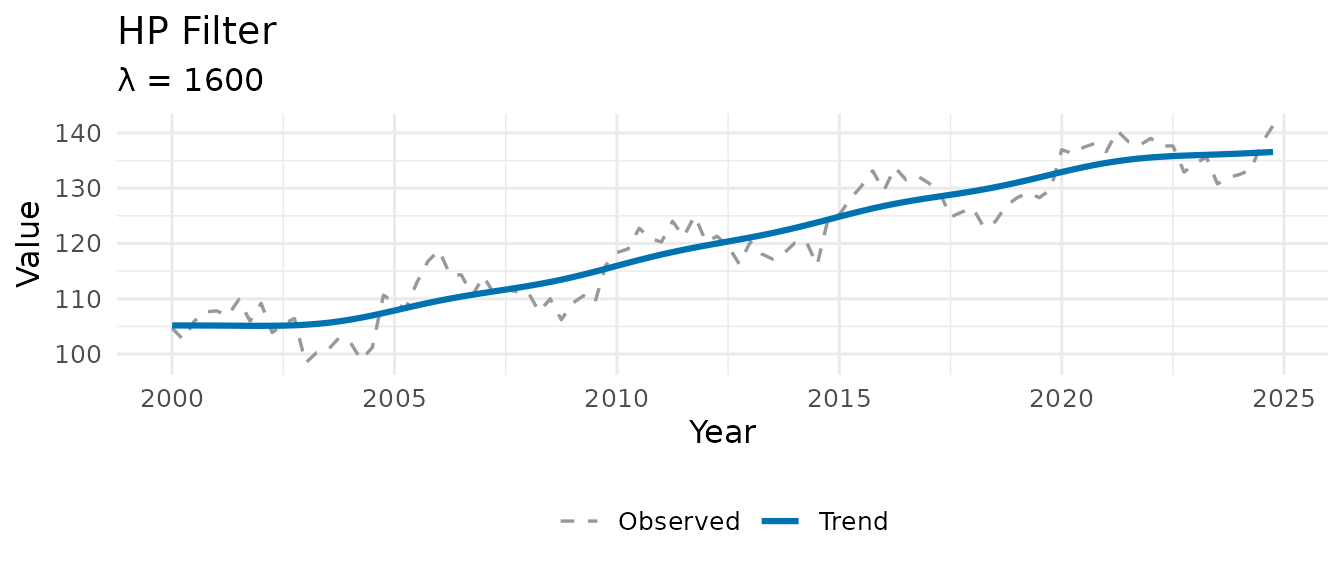
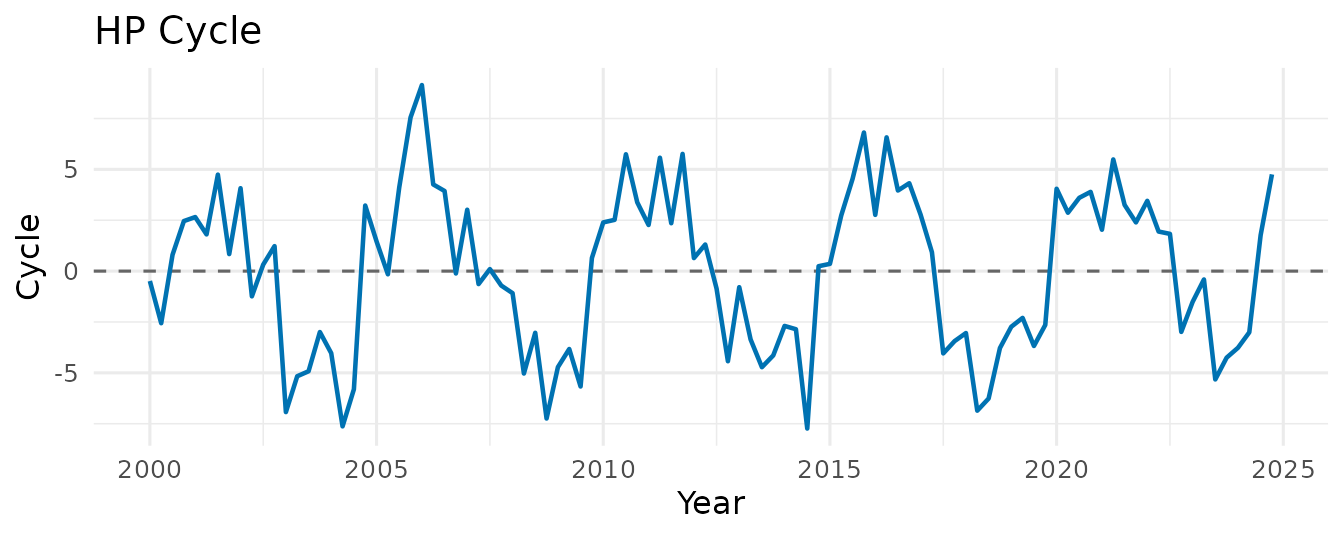
set.seed(42)
n <- 100
y <- ts(100 + 0.4 * (1:n) + 5 * sin(2 * pi * (1:n) / 20) + rnorm(n, sd = 2),
start = c(2000, 1), frequency = 4)
hp <- hp_filter(y)
hp
#> -- MacroFilter [HP] --
#> Observations : 100
#> Parameters : lambda = 1600
#> Cycle range : [-7.738, 9.143] sd = 3.897
#> Compute time : 0.002 sThe smoothing parameter is auto-selected from the series frequency via the Ravn-Uhlig (2002) heuristic:
which gives
for quarterly and
for monthly data — the conventional values. You can override it
explicitly: hp_filter(y, lambda = 1600).
3.2 hamilton_filter() — Regression-Based
Alternative
Hamilton (2018) proposes replacing the HP filter entirely with an OLS regression. The idea: project on a constant and lags of :
The fitted values form the trend; the residuals form the cycle. The horizon is set to two years ahead by default (e.g., quarters), long enough to capture business-cycle variation without filtering it out.
Advantages over HP: - No end-point distortion - No spurious cycles from integrated series - Produces stationary cycle estimates by construction
ham <- hamilton_filter(y) # auto-detects h = 8 for quarterly
ham
#> -- MacroFilter [Hamilton] --
#> Observations : 100
#> Parameters : h = 8, p = 4
#> Cycle range : [-13.41, 11.8] sd = 7.212
#> Compute time : 0.000 sNote that the first
observations of the trend and cycle are NA, because there
is insufficient history for the regression.
3.3 bhp_filter() — Boosted HP
Phillips & Shi (2021) propose iteratively applying the HP filter: at each step, the filter is re-run on the residuals from the previous pass, and the resulting increment is added to the trend estimate. This procedure converges to a trend that better tracks stochastic variation.
where is the HP smoothing operator. Three stopping rules are available:
| Rule | Description |
|---|---|
"bic" (default) |
Minimise the Schwarz information criterion |
"adf" |
Stop when the cycle passes an Augmented Dickey-Fuller stationarity test |
"fixed" |
Run exactly iter_max iterations |
bhp <- bhp_filter(y, stopping = "bic")
bhp
#> -- MacroFilter [bHP] --
#> Observations : 100
#> Parameters : lambda = 1600, iterations = 47, stopping_rule = bic
#> Cycle range : [-5.487, 4.068] sd = 1.857
#> Compute time : 0.002 sInternally, MacroFilters precomputes the sparse penalty matrix once and reuses it across all iterations, so the cost per iteration is a single sparse matrix–vector multiply rather than a full solve.
4. The Crown Jewel: mbh_filter()
The Problem with Squared Loss
Every filter above minimises squared residuals. When a pandemic shock drops GDP by 15% in a single quarter, that one observation exerts enormous leverage — it is 100× more influential than a typical quarterly fluctuation. The filter accommodates it by bending the trend downward, producing a spurious trend break that infects every subsequent output gap estimate.
The MBH Solution: Huber Loss + Boosting
The MacroBoost Hybrid (MBH) filter replaces squared loss with Huber loss:
Observations with residuals smaller than are treated like ordinary squared-error observations. Observations with residuals larger than — the structural shocks — contribute only linearly, massively reducing their influence on the trend estimate.
Additive Model
The trend is decomposed into two additive base learners fitted via
component-wise L2-boosting (mboost):
-
bols(time, intercept = TRUE)— captures the global linear drift. -
bbs(time, knots, degree = 3, differences = 2, boundary.knots)— a cubic P-spline withknotsinterior knots that captures smooth nonlinear curvature.
The default knots = min(max(20, floor(n/2)), 250) is
deliberately generous — it gives the spline enough flexibility to follow
genuine low-frequency movements without overfitting, while the Huber
loss ensures that shock-contaminated quarters are downweighted. The cap
of 250 keeps the basis bounded on long / high-frequency series, where
extra knots add cost but not flexibility (the penalty, not the knot
count, governs smoothness).
Parameters
| Parameter | Default | Role |
|---|---|---|
knots |
min(max(20, n/2), 250) |
P-spline flexibility — higher = more local adaptability (capped at 250) |
mstop |
500 |
Boosting iterations — more = finer approximation |
d |
"auto" |
Huber delta — if "auto", calibrated via the MAD of the
HP cyclical residual (output-gap scale) |
nu |
0.1 |
Shrinkage / learning rate — controls step size per iteration |
boundary.knots |
NULL |
B-spline domain anchor — if NULL, uses
range(time_idx); fix to c(1, T_max) for
real-time vintage stability |
By default, d is auto-calibrated as the MAD of the HP
cyclical residual, anchoring the Huber threshold to the output-gap
(business-cycle) scale rather than the growth-rate scale. You can
override it with an explicit numeric value: d = 0.01 is
typical for growth rates, while larger values suit index-level
series.
For real-time applications where the sample grows one period at a
time, set boundary.knots = c(1, T_max) to anchor the
B-spline domain to the full-sample range — this prevents the basis from
shifting between vintages and makes trends comparable across publication
dates.
Quick example
France and Spain had two of the sharpest COVID-19 contractions in the EU (approximately −14 % and −18 % quarter-on-quarter in 2020 Q2 respectively), both followed by a rapid V-shaped recovery — making them a demanding real-world stress test for any trend filter.
# FRED public endpoint — no API key needed.
# See data-raw/intl_gdp.R for the full reproducible download script.
read_fred <- function(id) {
url <- sprintf("https://fred.stlouisfed.org/graph/fredgraph.csv?id=%s", id)
dt <- read.csv(url, col.names = c("date", "gdp_real"), na.strings = ".")
dt$date <- as.Date(dt$date)
dt$gdp_log <- log(as.numeric(dt$gdp_real))
dt[!is.na(dt$gdp_real), ]
}
fr_raw <- read_fred("CLVMNACSCAB1GQFR")
es_raw <- read_fred("CLVMNACSCAB1GQES")
# Apply HP + MBH per country.
# For log-level series, auto d (MAD of diff) is too tight — calibrate d on the
# cycle scale instead (see vignette "Hyperparameter Tuning for the MBH Filter").
make_trend_df <- function(raw, country) {
dt <- raw[raw$date >= as.Date("2000-01-01"), ]
g <- ts(dt$gdp_log, start = c(2000, 1), frequency = 4)
hp <- hp_filter(g)
mbh <- mbh_filter(g, d = mad(hp$cycle))
data.frame(country = country,
t = as.numeric(time(g)),
observed = as.numeric(g),
hp = as.numeric(hp$trend),
mbh = as.numeric(mbh$trend))
}
df_plot <- rbind(
make_trend_df(fr_gdp, "France"),
make_trend_df(es_gdp, "Spain")
)
# Keep Spain filter objects for the S3 class examples in Section 5
dt_es <- es_gdp[es_gdp$date >= as.Date("2000-01-01"), ]
gdp <- ts(dt_es$gdp_log, start = c(2000, 1), frequency = 4)
hp_res <- hp_filter(gdp)
mbh_res <- mbh_filter(gdp, d = mad(hp_res$cycle))
mbh_res
#> -- MacroFilter [MBH] --
#> Observations : 105
#> Parameters : knots = 52, d = 0.01463, mstop = 500, mstop_initial = 500, nu = 0.1, df = 4, select_mstop = FALSE
#> Cycle range : [-0.2231, 0.03137] sd = 0.02963
#> Compute time : 0.112 s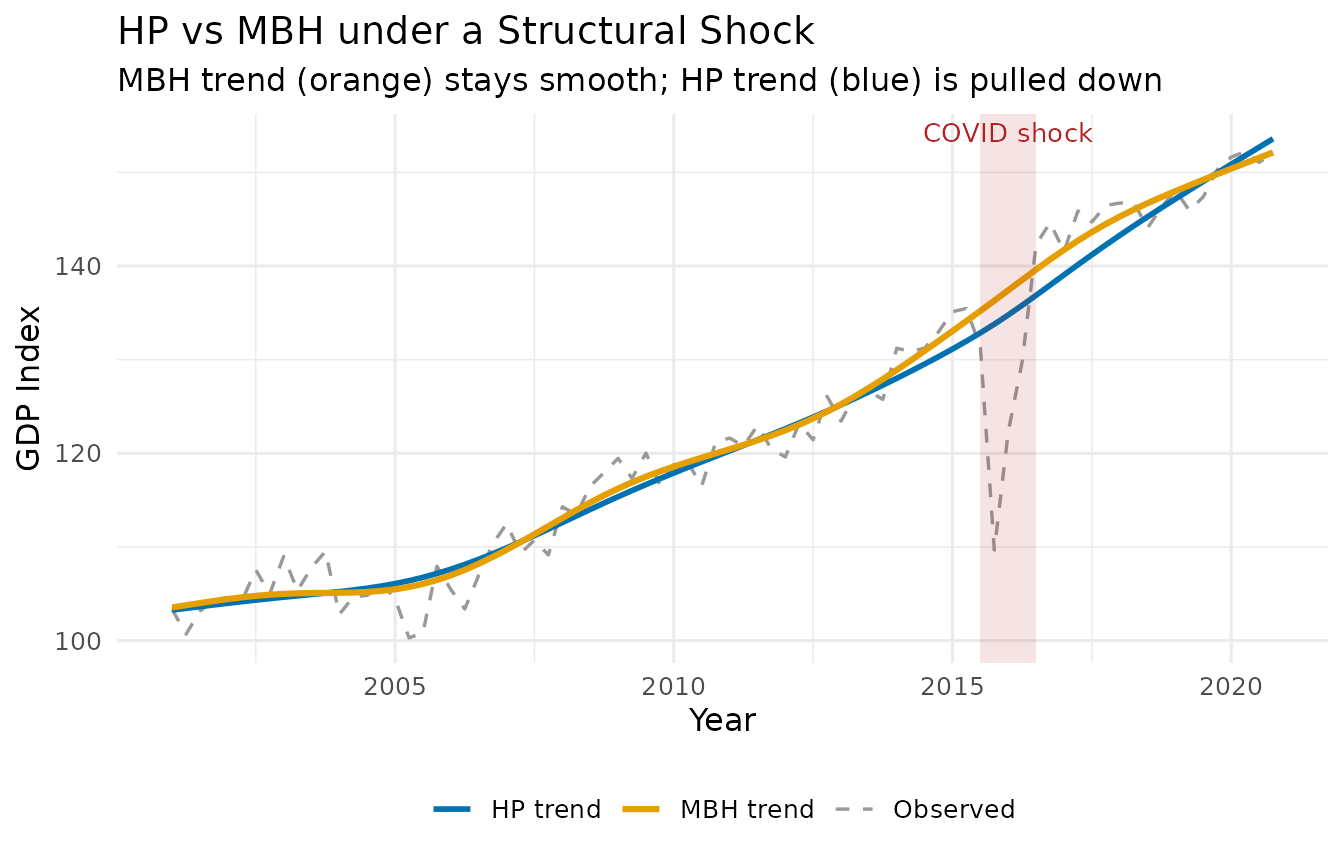
5. The macrofilter S3 Class
All four functions return a list of class
c("macrofilter", "list") with four core named elements:
| Element | Type | Description |
|---|---|---|
$trend |
numeric | Trend component |
$cycle |
numeric | Cyclical component |
$data |
numeric | Original series (immutable) |
$meta |
named list | Filter method, parameters, temporal identity (ts_class,
tsp, idx), compute time |
When a filter is called with boot_iter > 0, the
object additionally carries two bootstrap confidence bands (see the
Uncertainty bands vignette):
| Element | Type | Description |
|---|---|---|
$trend_lower |
numeric | Lower 95% band (trend - 1.96 * bootstrap sd) |
$trend_upper |
numeric | Upper 95% band (trend + 1.96 * bootstrap sd) |
Printing
mbh_res
#> -- MacroFilter [MBH] --
#> Observations : 105
#> Parameters : knots = 52, d = 0.01463, mstop = 500, mstop_initial = 500, nu = 0.1, df = 4, select_mstop = FALSE
#> Cycle range : [-0.2231, 0.03137] sd = 0.02963
#> Compute time : 0.112 sThe print method shows the method, the number of
observations, the key parameters, the cycle range, and how long the
filter took to run.
Accessing components
# Trend and cycle as plain vectors
head(mbh_res$trend, 8)
#> [1] 12.28386 12.29250 12.30114 12.30977 12.31839 12.32701 12.33562 12.34422
head(mbh_res$cycle, 8)
#> [1] -0.002260454 0.001660910 0.003172859 0.005189628 0.006669714
#> [6] 0.005797033 0.006754803 0.004490809
# Verify the fundamental identity: trend + cycle == data
max(abs((mbh_res$trend + mbh_res$cycle) - mbh_res$data)) # should be < 1e-9
#> [1] 0Inspecting metadata
str(mbh_res$meta)
#> List of 13
#> $ method : chr "MBH"
#> $ knots : int 52
#> $ d : num 0.0146
#> $ mstop : int 500
#> $ mstop_initial : int 500
#> $ nu : num 0.1
#> $ df : int 4
#> $ select_mstop : logi FALSE
#> $ boundary.knots: NULL
#> $ compute_time : num 0.112
#> $ ts_class : chr "ts"
#> $ tsp : num [1:3] 2000 2026 4
#> $ idx : NULLThe meta list stores every parameter used by the filter,
making results fully reproducible from the object alone — no need to
track arguments separately.
Plotting cycles side by side
df_cycle <- data.frame(
t = as.numeric(time(gdp)),
HP_cycle = as.numeric(hp_res$cycle),
MBH_cycle = as.numeric(mbh_res$cycle)
)
ggplot(df_cycle, aes(x = t)) +
geom_hline(yintercept = 0, linetype = "dashed", colour = "grey40") +
geom_line(aes(y = HP_cycle, colour = "HP cycle"), linewidth = 0.8) +
geom_line(aes(y = MBH_cycle, colour = "MBH cycle"), linewidth = 0.8) +
annotate("rect",
xmin = 2020.00, xmax = 2020.75,
ymin = -Inf, ymax = Inf,
alpha = 0.12, fill = "firebrick") +
scale_colour_manual(values = c("HP cycle" = "#0072B2", "MBH cycle" = "#E69F00")) +
labs(
title = "Cyclical Components",
subtitle = "HP cycle absorbs the shock; MBH cycle faithfully records it",
x = "Year", y = "Cycle", colour = NULL
) +
theme_minimal(base_size = 12) +
theme(legend.position = "bottom")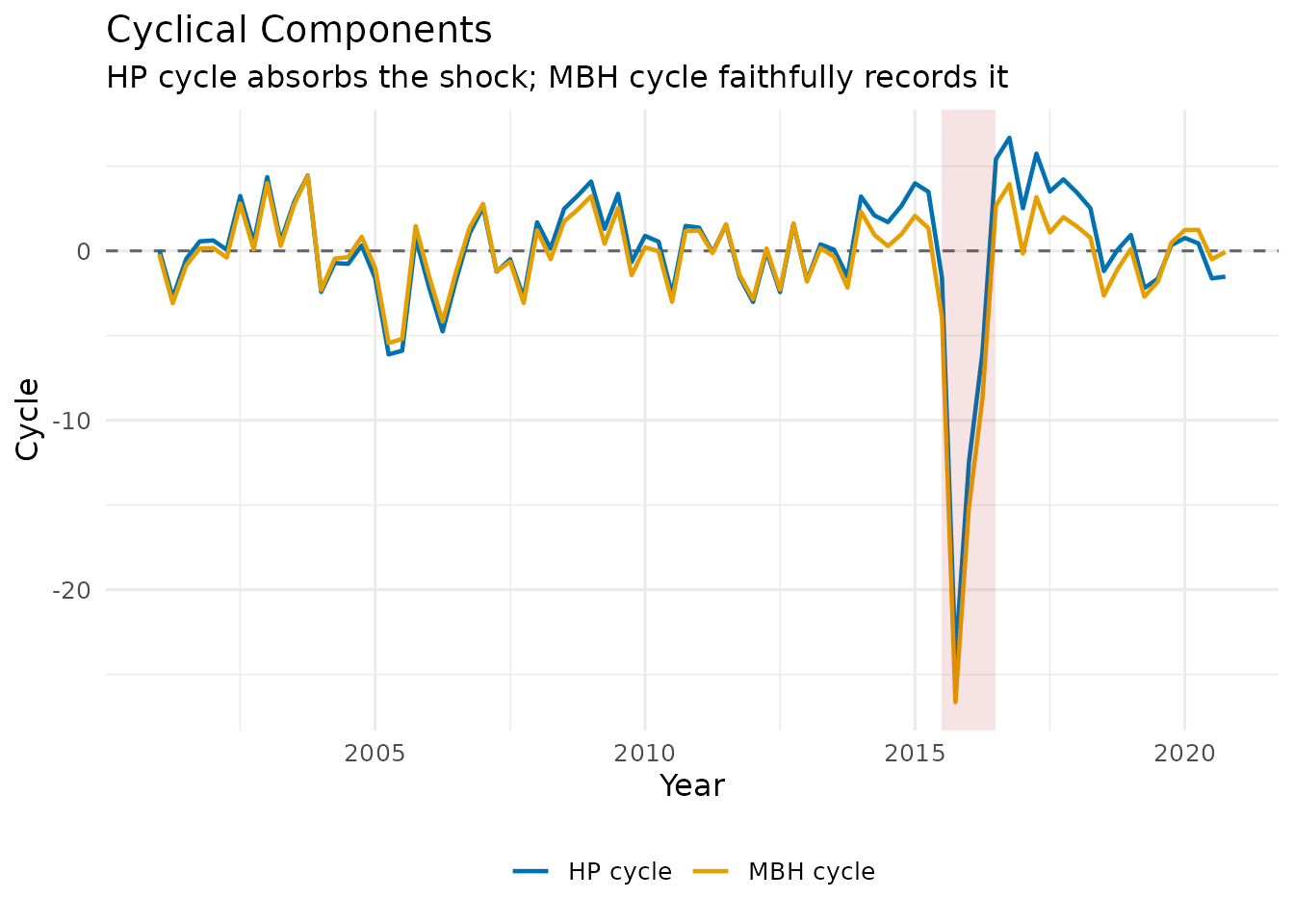
In the MBH cycle, the COVID quarters appear as large negative spikes — the filter correctly recognises them as transitory deviations rather than a change in the long-run level. The HP cycle, by contrast, spreads the shock over several surrounding quarters as it tries to reconcile the trend distortion.
References
- Hodrick, R. J., & Prescott, E. C. (1997). Postwar U.S. Business Cycles: An Empirical Investigation. Journal of Money, Credit and Banking, 29(1), 1–16.
- Ravn, M. O., & Uhlig, H. (2002). On Adjusting the Hodrick-Prescott Filter for the Frequency of Observations. Review of Economics and Statistics, 84(2), 371–376.
- Hamilton, J. D. (2018). Why You Should Never Use the Hodrick-Prescott Filter. Review of Economics and Statistics, 100(5), 831–843.
- Phillips, P. C. B., & Shi, Z. (2021). Boosting: Why You Can Use the HP Filter. International Economic Review, 62(2), 521–570.